- Index
- index
- README
- Sommaire Informatique
- Sommaire Maths
- Sommaire Chimie
- Sommaire Physiques
- Régime transitoire
- Nombres complexes
- Formules de Taylor
- Espace vectoriel
- Séries numériques
- Loi de composition
- variables et opérations
- Régime pseudo-périodique
- Bases locales
- Matrices
- Probabilités
- Suites numériques
- Comparaisons locale de fonctions
- Relation binaire
- Intégration
- Continuité
- Sommes et produits
- Nombres quantiques
- Ensembles
- Théorème des gendarmes
- Ondes acoustiques
- Champs de vecteurs
- Ecriture complexe et Impédances
- Intégration discrète
- Valeur propre
- Lambda-Calcul
- Fonctions hyperboliques
- Pivot de Gauss
- Dérivée
- Calcul Polynomial
- Binôme de newton
- Configuration Atomique
- Logique
- Nabla
- Fonctions de la variable réelle
- Déterminants
- Laplacien
- lancer un programme
- Série de Reimann
- Ondes mécaniques
- Schéma de Thévenin-Norton
- Divergence
- Fonctions trigonométriques
- Gradient
- Développements généralisés
- Développements limités
- Systèmes de coordonnées
- Reduction d'endomorphisme
- Méthode Acide-Bases
- Nomenclature
- Raisonnements logiques
- Structure de groupes
- Intervalle et voisinage
- Théorème des accroissements finis
- Applications linéaires
- Régime apériodique
- Energie d'ionisation
- Analyse Vectorielle
- Constante d'équilibre
- Equations différentielles linéaires
- Systèmes linéaires
- Fractions rationnelles
- Décomposition en éléments simples
- Puissance Electrique
- Oscillateur Harmonique
- Polynomes
- Preuve GL est un groupe
Systèmes de coordonnées
mecanic
Définition
Lorsque l'on étudie un système mécanique, il existes plusieurs façons de représenter la position d'un point dans l'espace. Dans tous les cas, un point est représenté par un tuplet ou un triplet (selon si on est en 2D ou 3D). Le système de coordonnées indique comment interpréter ces coordonnées.Système cartésien
C'est le système le plus simple, le plus trivial. On écrit les coordonnées (x,y,z).
Système cylindrique
Si on étudie un mouvement de rotation autour d'un axe, il peut être utile de représenté un point a travers de coordonnées cylindrique, écrites (\(r\), \(\phi\), \(z\))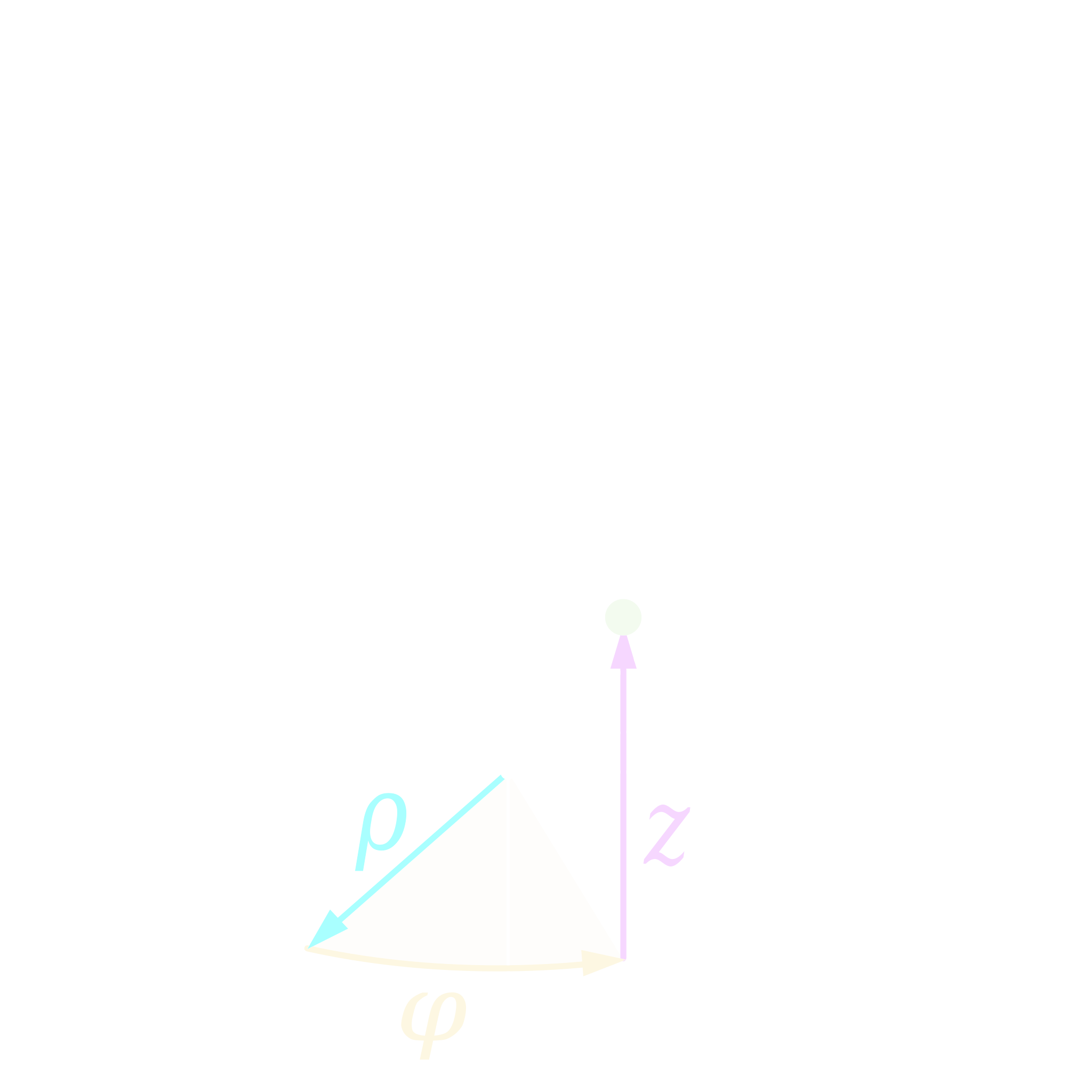
Avec \(r\) étant le rayon du cylindre, \(\phi\) étant l'angle entre le point et l'axe \(e_x\), et \(z\) la hauteur. A noter que \(\rho\) est le vecteur unitaire a \(\phi\) degrés de l'axe \(e_x\). Ainsi :
\[ \rho = cos(\phi)e_x + sin(\phi)e_y \]
Et de la on tiens :
\[ P = r \rho + ze_z \]
Système sphérique
Si on étudie le mouvement d'une rotule ou de rotation autour d'une sphère, on peut utiliser des coordonnées sphériques, noté (\(r, \theta, \phi\))
Avec \(r\) le rayon de la sphère, \(\phi\) l'axe "polaire" (par rapport a l'axe \(e_x\)), et \(\theta\) la colatitude (par rapport a l'axe \(e_z\))